Connected Vehicle
TCROS驗測服務
已公告
TCROS 2024
台灣車聯網產業協會(TTIA)於2024年4月16日公告「Taiwan C-ITS Roadside Open Standards, TCROS」標準及相關驗測規範,其內容可因應我國即有之「都市交通控制通訊協定3.0版」的應用架構,並可滿足SAE J2735的國際標準通訊協定。 TCROS 2024主要包含SPaT 、V2X MAP 、V3 TCROS USE、SRM、SSM、PSM、TIM、RSA、EVA、BSM 10項協定內容。
TCROS 2024 驗測項目
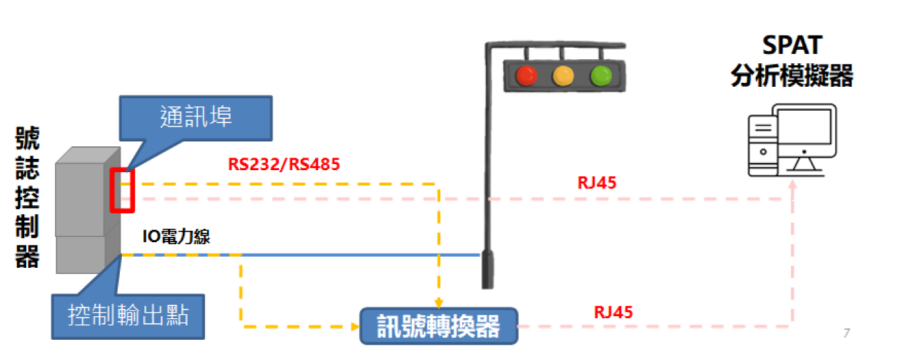
號誌控制器驗測項目
- TS1: V3 TCROS USE SPAT車聯網資訊發佈格式一致性
- TS2: V3 TCROS USE SPAT車聯網資訊發佈時間反應性
- TS3: V3 TCROS USE SignalGroupID資訊管理運作正確性
- TS4: V3 TCROS USE SPAT車聯網車行用資訊回傳頻率運作正確性
- TS5: V3 TCROS USE SPAT 車聯網資訊發佈-運作情境一【進階】
- TS6: V3 TCROS USE SPAT 車聯網資訊發佈-運作情境二【進階】
- TS7: V3 TCROS USE SPAT 車聯網資訊發佈-運作情境三【進階】
- TS8: TCROS SPAT 協定格式一致性【選測】
RSU驗證架構
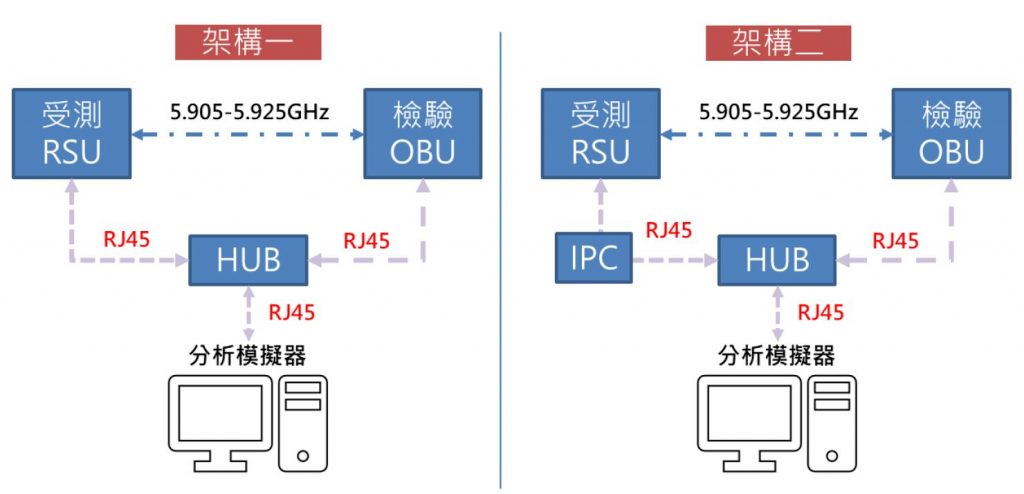
OBU驗證架構
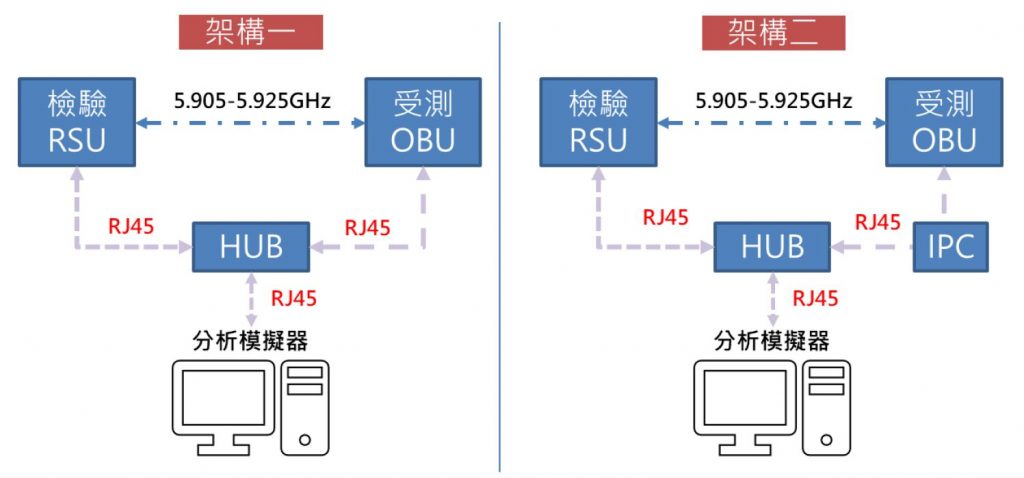
車聯網設備驗測項目
- ROS1: TCROS SPAT協定內容正確性
- ROS2: TCROS V2X MAP協定內容正確性
- ROS3: OBU編譯TCROS SRM協定內容正確性
- ROS4: RSU編譯TCROS SSM協定內容正確性
- ROS5: RSU編譯TCROS TIM協定內容正確性
- ROS6: RSU編譯TCROS PSM協定內容正確性
- ROS7: OBU解譯TCROS SPAT協定內容正確性
- ROS8: OBU解譯TCROS V2X MAP協定內容正確性
- ROS9: RSU解譯TCROS SRM協定內容正確性
- ROS10: OBU解譯TCROS SSM協定內容正確性
- ROS11: OBU解譯TCROS TIM協定內容正確性
- ROS12: OBU解譯TCROS PSM協定內容正確性
- ROS19: OBU編譯TCROS BSM協定內容正確性
- ROS20: RSU編譯TCROS RSA協定內容正確性
- ROS21: OBU編譯TCROS EVA協定內容正確性
- ROS22: RSU解譯TCROS BSM協定內容正確性
- ROS23: OBU解譯TCROS RSA協定內容正確性
- ROS24: RSU解譯TCROS EVA協定內容正確性
ROS13~ROS18為進階項目,請參閱公告文件。